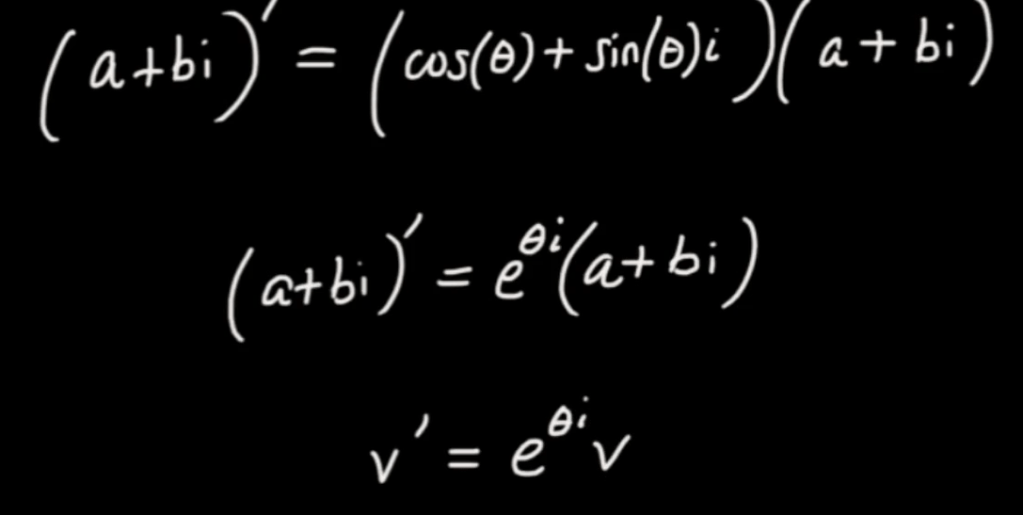
In a Descartes Coordinate system, given a vector v, think about turning it a theta angle to another vector v’. it’s not too hard to deduce the following using Euler’s formula
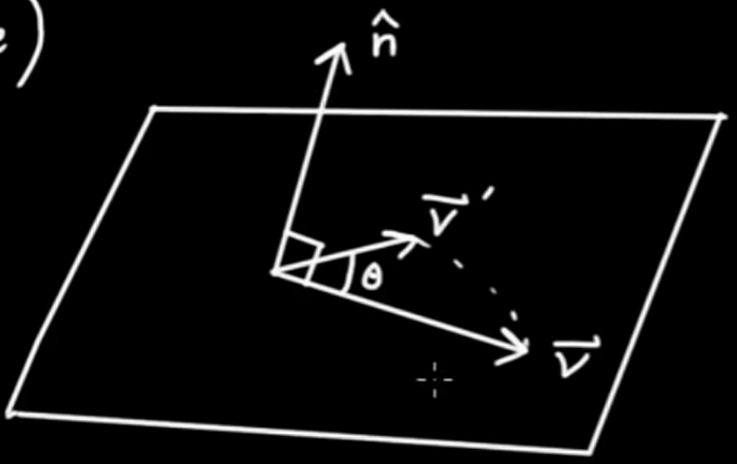
What about 3D rotation rather than the 2D rotation above?
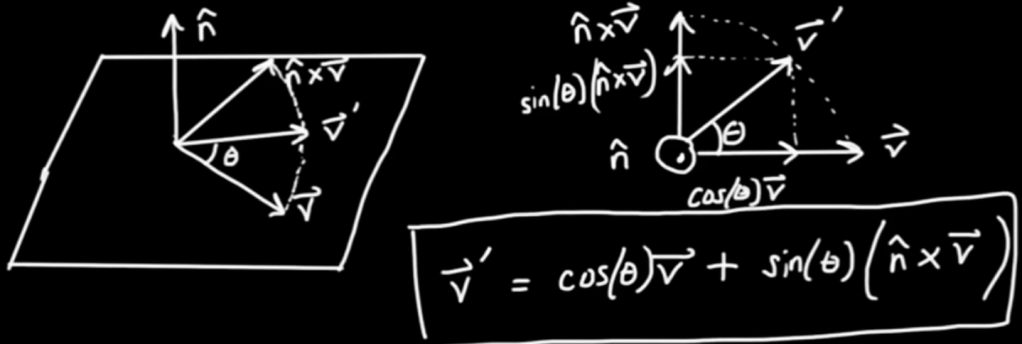
If we plug in quaternion here, we can get
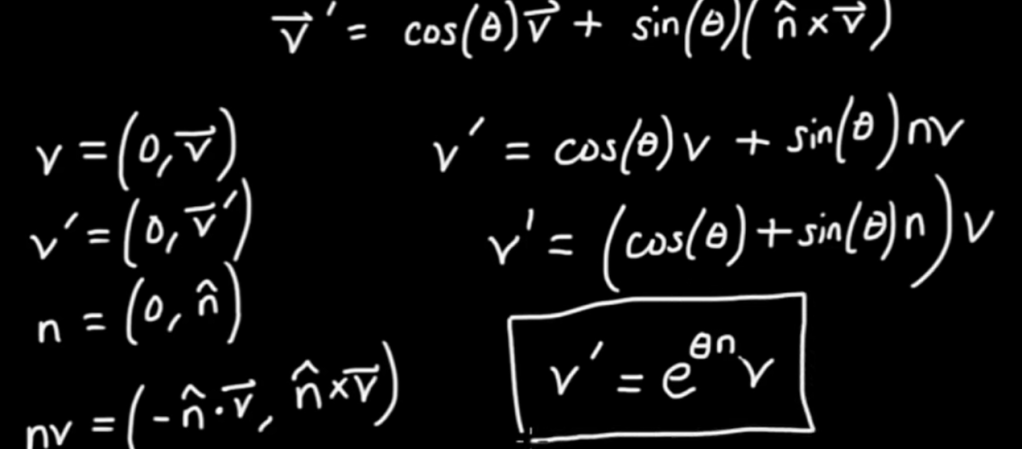
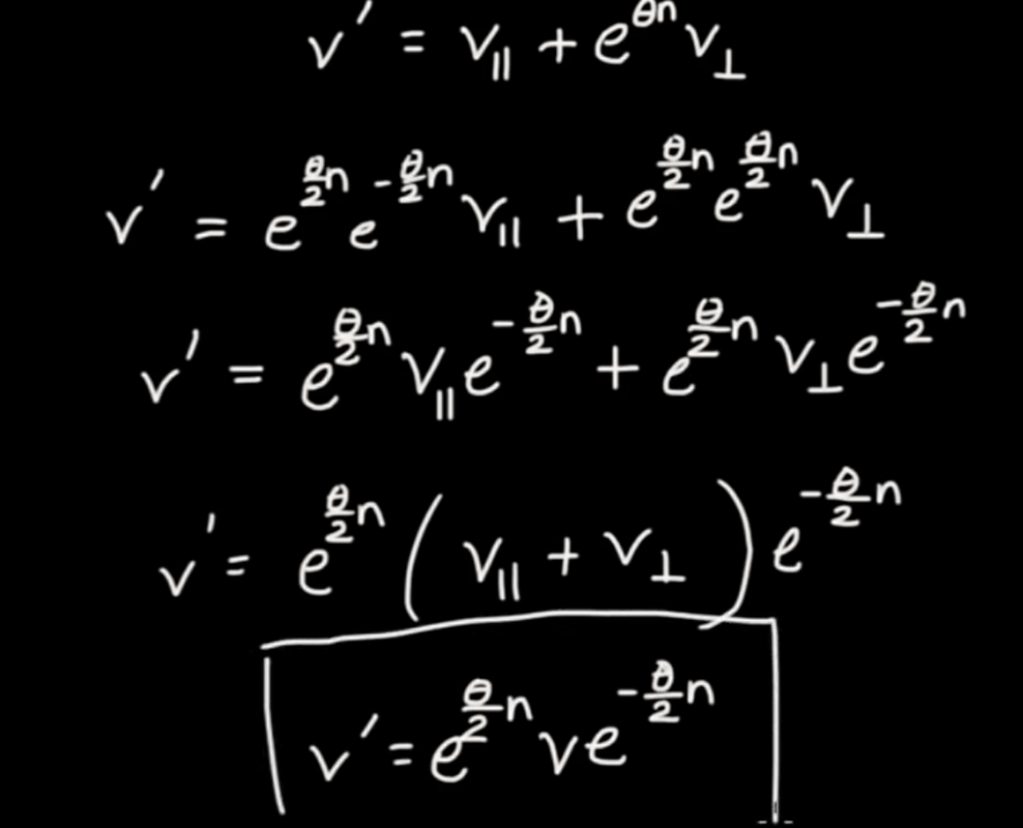
Next, generalize the rotation, Rodrigues Rotation Formula and Quaternion Exponentials. We can find a very compact form