If we can control a simple linear system such as a pendulum, we can also control rocket launching. The equation to describe it is not a linear one:
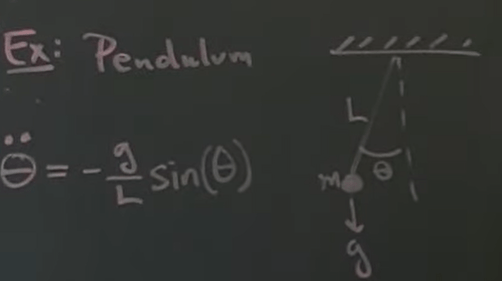
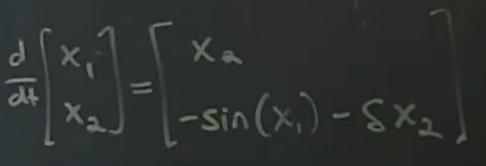
So now if we define two variables, theta as x1 and theta dot as x2, the derivative of theta, then we can write out the following. Then to solve this linear system to control it.
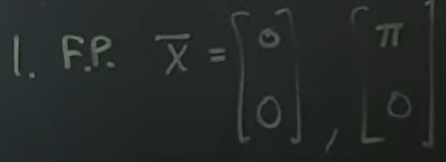
First, we need to define the fixed points:
We can then linearize about it by taking Jacobean or derivative matrix
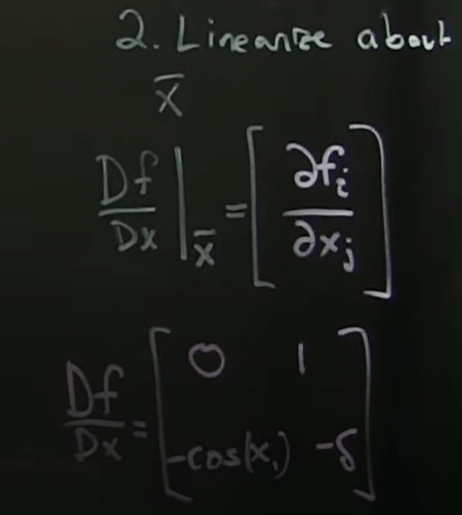
so with x1 = 0, and delta given, we can calculate the eigen values, if it’s less than zero, like the pendulum is downward at the bottom, the lambda values are both negative, hence stable, the other scenario, we have one negative, stable, the other positive, non stable.
