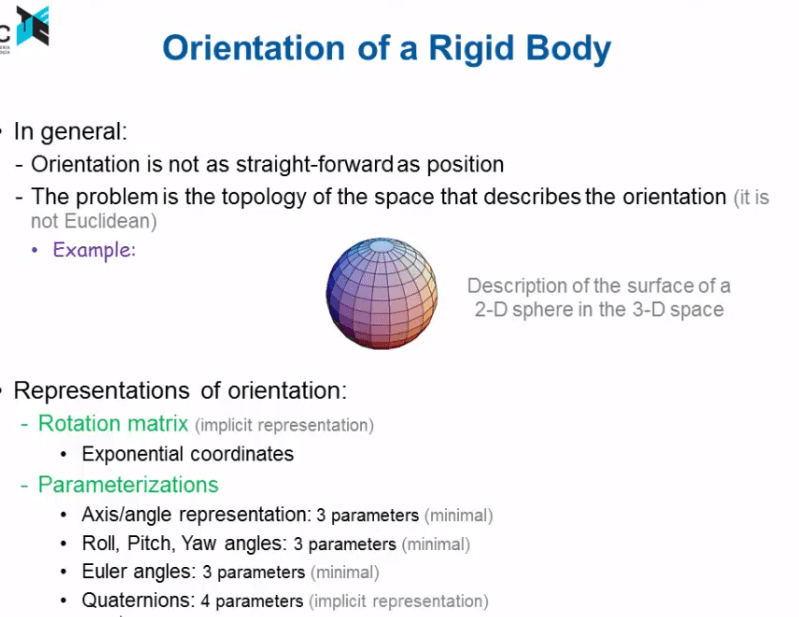
math is all familiar but need to highlight those relevant to robotics:
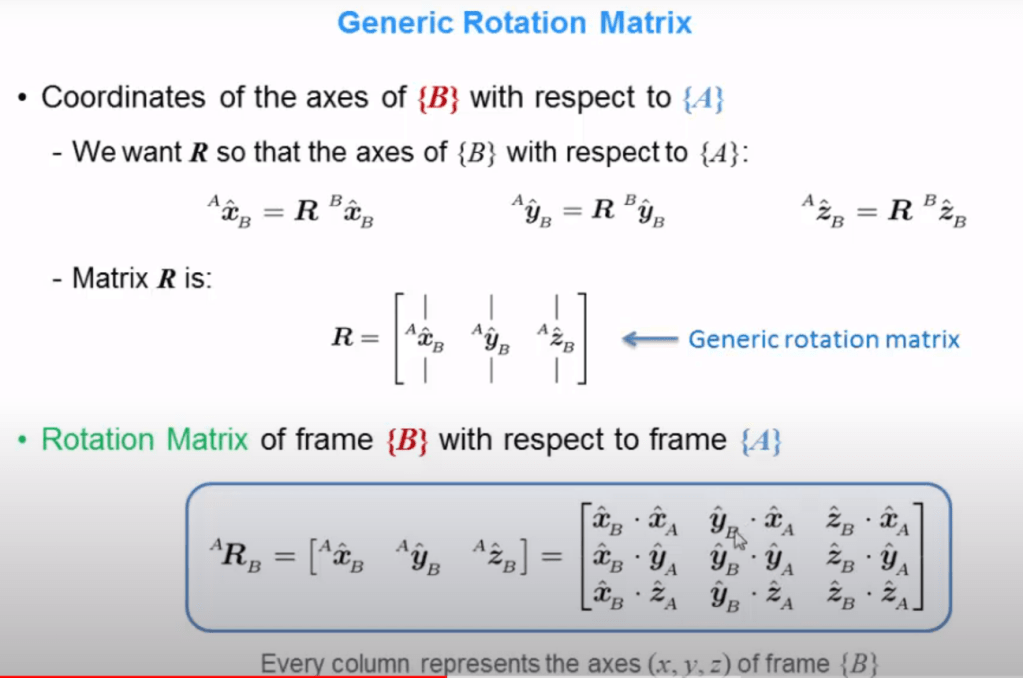
Generic rotation matrix, we first need to know the notation, with respect to in the superindex position


Homogeneous Transformations
Inverse Kinematics
Inverse Kinematics
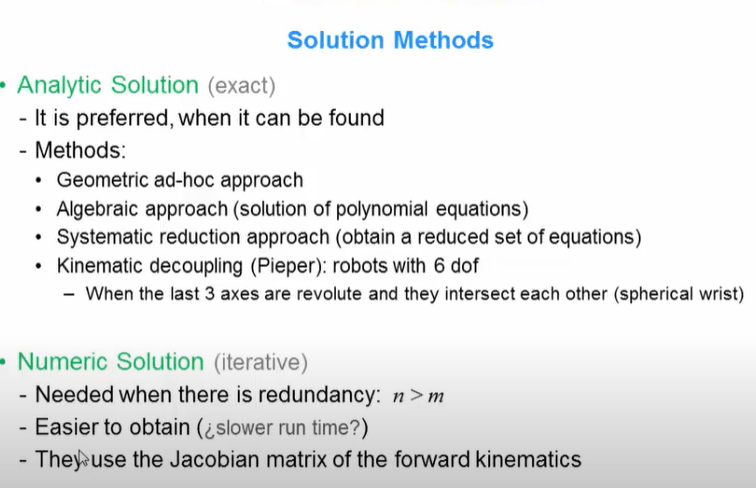
- Newton’s Method: Also known as the Newton-Raphson method, it’s primarily used to find zeros (roots) of a real-valued function. It uses the function’s value and its derivative to find a better approximation to the root in each iteration.
- Gradient Descent: It’s an optimization algorithm used to minimize (or maximize, in the case of gradient ascent) a function iteratively. It uses the function’s gradient (first-order derivative) to determine the direction in which the function’s value decreases the fastest.
