I’d like to identify the key elements in building up the moving robot arm to pick up Pingpon balls.
First he creates the base for robot arm by sending to https://www.3dfuel.com/ for 3D printing, he summarized tools/sources as below:
Get your first 10 PCBs for free at https://www.pcbway.com/
Filament from: https://www.3dfuel.com/
Lulzbot 3D Printers: http://bit.ly/2Sj6nil
Lincoln Electric Welder: https://bit.ly/2Rqhqos
CNC Router: https://bit.ly/2QdsNjt
Ryobi Tools: http://bit.ly/2RhArcD
Axminster Micro Lathe: http://bit.ly/2Sj6eeN
3D Printer Filament: http://bit.ly/2PdcdUu
Soldering Iron: http://bit.ly/2DrNWDR
Vectric CNC Software: http://bit.ly/2zxpZqv
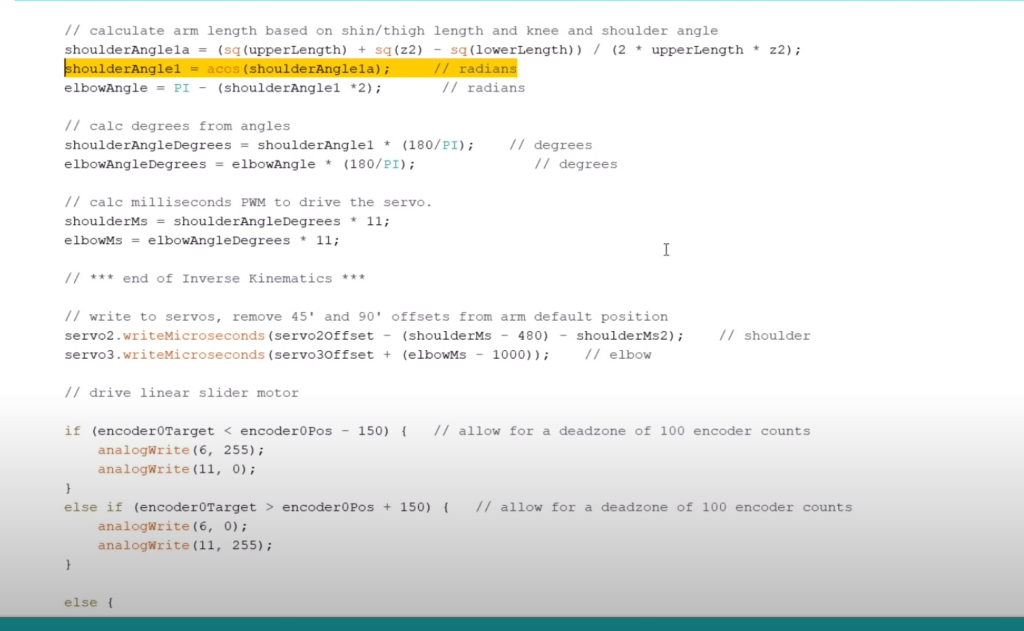
Equipped each arm part with servo, then installed Arduino UNO to program. Turn the math to move arms below into Arduino codes:

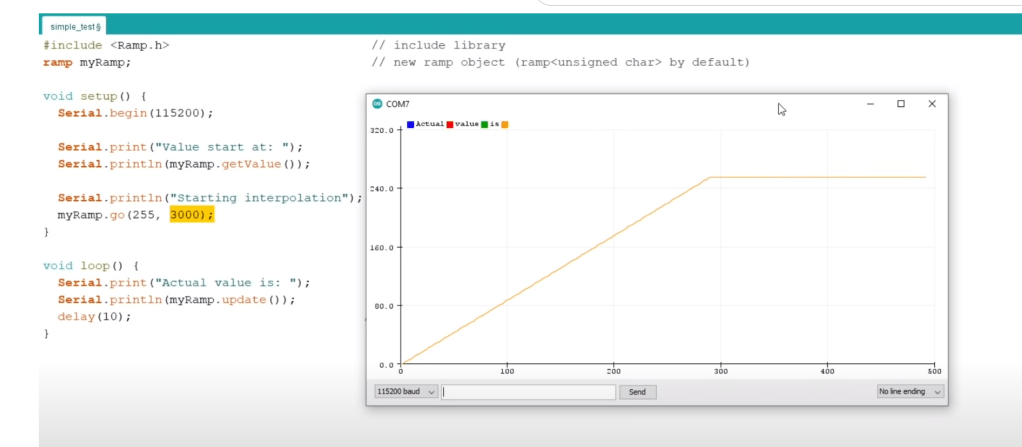
He referecen below open codes Arduino interpolation library to avoid writing from scratch.
Finally he rind sensors to sense if Pingpon ball is around.
