To describe physical features of the robot, we use URDF file or mesh file for complicated cubic objects.
Here GPT provides a simple urdf file for a rover with IR sensor and want to do line tracking roving:
<?xml version="1.0" ?>
<robot name="line_tracking_rover">
<!-- Chassis Link -->
<link name="chassis">
<visual>
<geometry>
<box size="0.5 0.3 0.2"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.5 0.3 0.2"/>
</geometry>
</collision>
<inertial>
<mass value="5.0"/>
<inertia ixx="0.1" ixy="0" ixz="0" iyy="0.1" iyz="0" izz="0.1"/>
</inertial>
</link>
<!-- IR Sensor Link -->
<link name="ir_sensor">
<visual>
<geometry>
<cylinder length="0.05" radius="0.02"/>
</geometry>
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.02"/>
</geometry>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.0001" ixy="0" ixz="0" iyy="0.0001" iyz="0" izz="0.0001"/>
</inertial>
</link>
<!-- Joint to attach IR sensor to the chassis -->
<joint name="ir_sensor_joint" type="fixed">
<parent link="chassis"/>
<child link="ir_sensor"/>
<origin xyz="0.25 0 0.1" rpy="0 0 0"/>
</joint>
<!-- ... Additional links and joints for wheels and other components ... -->
</robot>
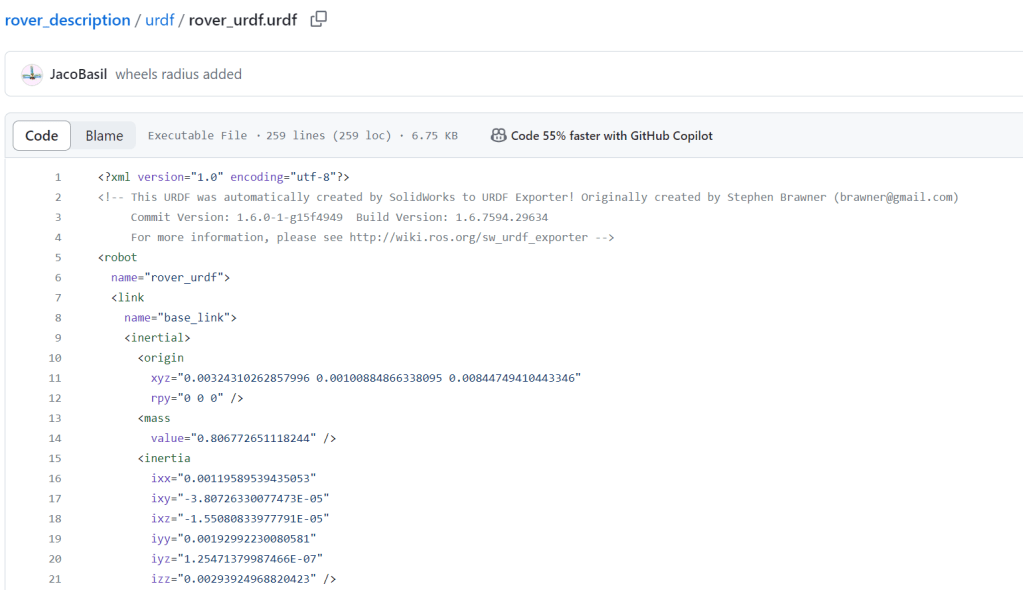
It’s easy to browse github and find sample urdf codes too for example
Next, what is difference between xacro and urdf format?
Both URDF (Unified Robot Description Format) and Xacro (XML Macros) are used in ROS (Robot Operating System) to describe robots, but they serve slightly different purposes and have different capabilities.
- URDF (Unified Robot Description Format):
- URDF is a XML format for representing a robot model in a structured and readable format.
- It describes the robot’s physical configuration, such as its bodies, joints, and sensors.
- However, URDF can get quite verbose when describing complex robots, and it does not support variables or macros, which can lead to a lot of repetition in the XML code.
- Xacro (XML Macros):
- Xacro is an extension to XML that provides macro capabilities to XML.
- It allows for more compact and maintainable representations of robot descriptions by providing features like variables, expressions, and conditional blocks.
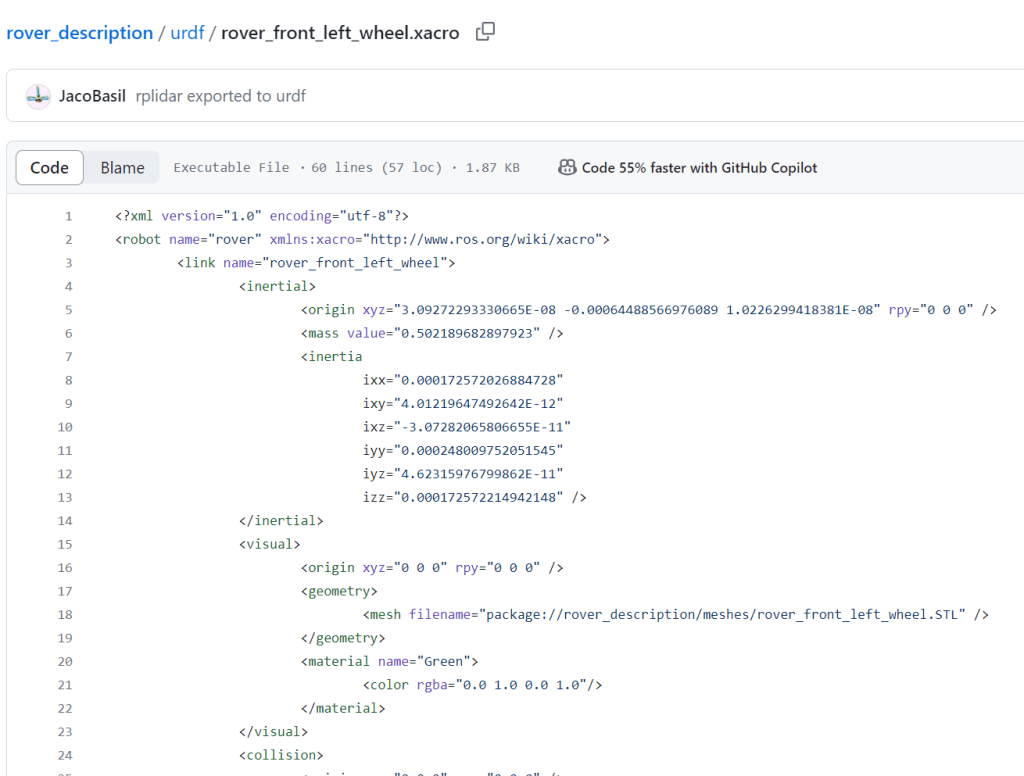
example of xacro file
For a more accurate URDF, you would need to measure your rover and possibly use a more complex geometry description, potentially using mesh files for a more accurate visual representation. here is an example of mesh file to describe a cube in STL format:
solid cube
facet normal 0 0 1
outer loop
vertex 0 0 0
vertex 1 0 0
vertex 1 1 0
endloop
endfacet
facet normal 0 0 -1
outer loop
vertex 0 0 1
vertex 1 0 1
vertex 1 1 1
endloop
endfacet
facet normal 0 1 0
outer loop
vertex 0 0 0
vertex 1 0 0
vertex 1 0 1
endloop
endfacet
facet normal 0 -1 0
outer loop
vertex 0 1 0
vertex 1 1 0
vertex 1 1 1
endloop
endfacet
facet normal 1 0 0
outer loop
vertex 0 0 0
vertex 0 1 0
vertex 0 1 1
endloop
endfacet
facet normal -1 0 0
outer loop
vertex 1 0 0
vertex 1 1 0
vertex 1 1 1
endloop
endfacet
endsolid cube
Then in the urdf file, need to reference this mesh file by using the following syntax in a <geometry> tag:
<geometry>
<mesh filename="package://your_package_name/meshes/cube.stl" scale="1 1 1"/>
</geometry>
Before I describe details in urdf file, i need to first design it from a sketch in my mind, what is the tool to convert sketch to a realistic design?