It’s feasible now to train robot hand to twirl a pen. I want to know how I can replicate, so ask chatGPT.
Training a robot hand to twirl a pen, especially using a video, is a complex task that combines computer vision, robotics, and machine learning. Here’s a high-level overview of how you could approach this:
- Video Processing:
- Use computer vision techniques, preferably with deep learning models like CNNs, to process the video and extract key frames or moments of your hand’s movement while twirling the pen.
- Extract features such as angles, velocities, and pen position during each phase of the twirl.
- Robot Hand Modeling:
- Understand the kinematics and dynamics of the robot hand. This will help in converting the video data into actionable motor commands for the robot.
- Define the robot’s degrees of freedom, the range of each joint’s motion, and the torque or force each motor can produce.
- Data Conversion:
- Map the video-extracted features to robot hand commands. This is the crucial step where you transform the human motion in the video into robot hand motion.
- This might involve some trial and error, and manual fine-tuning to make sure the robot hand is twirling the pen similarly to the human hand.
- Training using Reinforcement Learning:
- Reinforcement Learning (RL) can be an effective approach for training robot control tasks.
- Define the reward function for the robot, e.g., successfully twirling the pen without dropping it.
- Use an RL algorithm like Proximal Policy Optimization (PPO) or Deep Deterministic Policy Gradient (DDPG) to train the robot hand. This will involve the robot trying to twirl the pen multiple times, improving with each iteration.
- Simulation:
- Before trying it on the real robot hand, it’s advisable to simulate the pen-twirling task using robot simulation platforms like Gazebo or MuJoCo.
- Simulation allows rapid iteration and avoids potential damage to the robot or its surroundings.
- Transfer to Real Robot:
- Once you’ve trained the robot hand in simulation, you’ll need to transfer the learned behavior to the real robot. This process is known as “sim-to-real” transfer.
- Fine-tune the robot’s movements on the real hardware, making sure it can twirl the pen effectively.
- Safety:
- Always have safety protocols when working with robots. Make sure the robot is in a controlled environment where it can’t hurt anyone or itself during experiments.
Remember, this is a high-level overview, and the actual implementation might involve many more detailed steps and iterations. It’s a complex project, but with the right tools and persistence, it’s definitely achievable.
Particularily, how to Map the video-extracted features to robot hand commands? how to Develop a kinematic model, you don’t need to dwell on this robot hand project, but to use a simple yet illustrative example to explain with python codes?
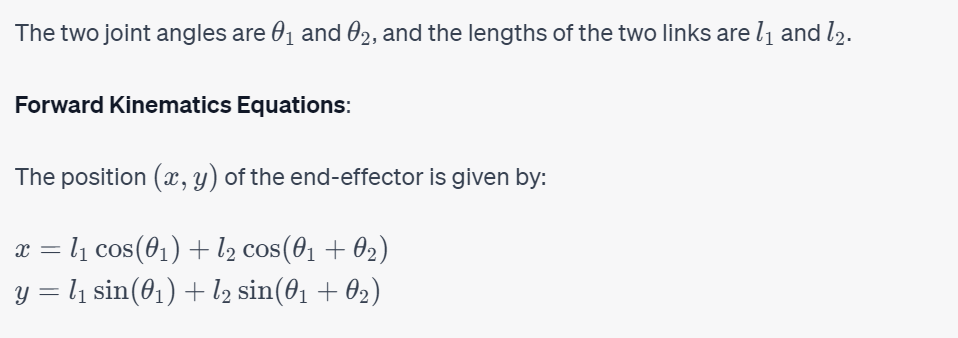
Let’s develop a simple kinematic model for a 2-link planar robot arm, often referred to as a 2DOF (degree of freedom) arm. This is a simplified model, but it’s a good starting point for understanding robot kinematics.
The robot has two joints and two links. We’ll look at the forward kinematics problem: given joint angles, compute the position of the end-effector (tip of the robot arm).
import math
def forward_kinematics(theta1, theta2, l1, l2):
x = l1 * math.cos(theta1) + l2 * math.cos(theta1 + theta2)
y = l1 * math.sin(theta1) + l2 * math.sin(theta1 + theta2)
return x, y
# Given example joint angles and link lengths
theta1 = math.radians(45) # converting degrees to radians
theta2 = math.radians(30)
l1 = 1.0 # arbitrary length
l2 = 0.5 # arbitrary length
x, y = forward_kinematics(theta1, theta2, l1, l2)
print(f"End-effector position: x={x:.2f}, y={y:.2f}")
