The end goal of building a perception pipeline is to broadcast a transform with the pose information of the object of interest.
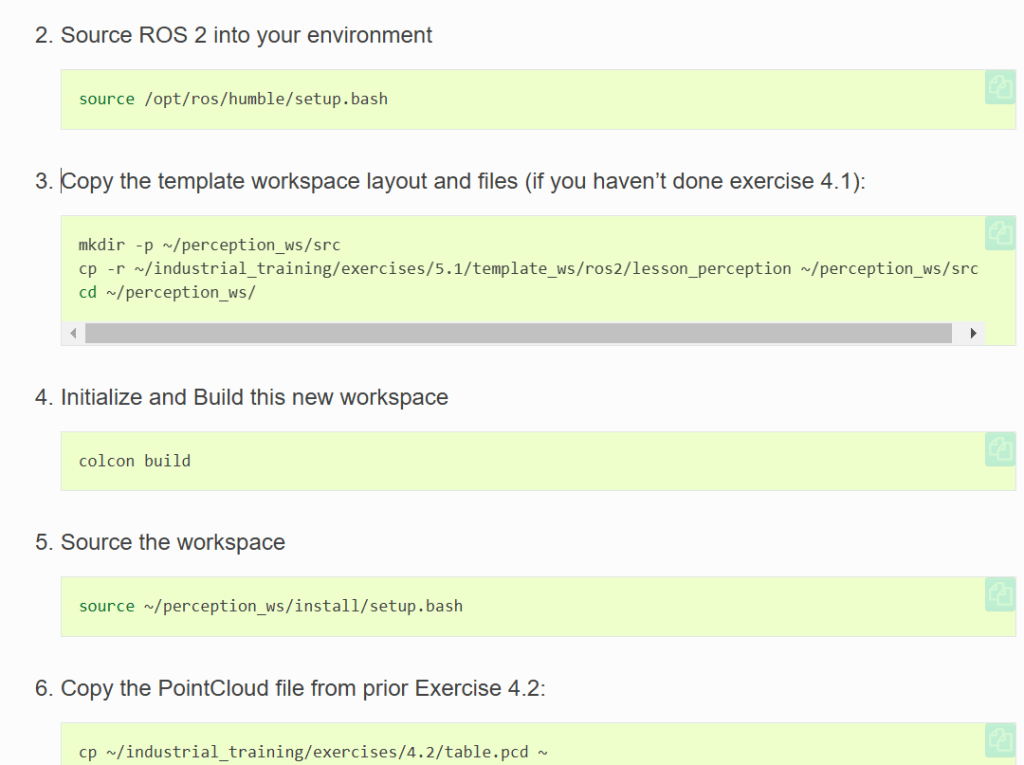
After disabling sourcing of other workspace, follow the following steps
Zoom in perception_node.cpp file to edit:
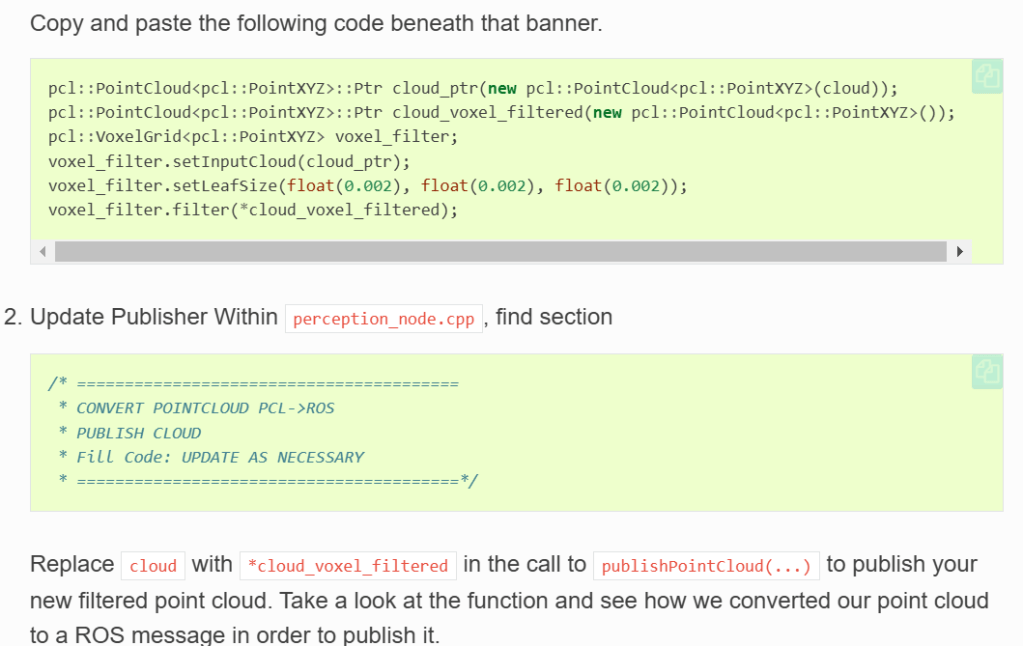
first, find the voxel grid section and add
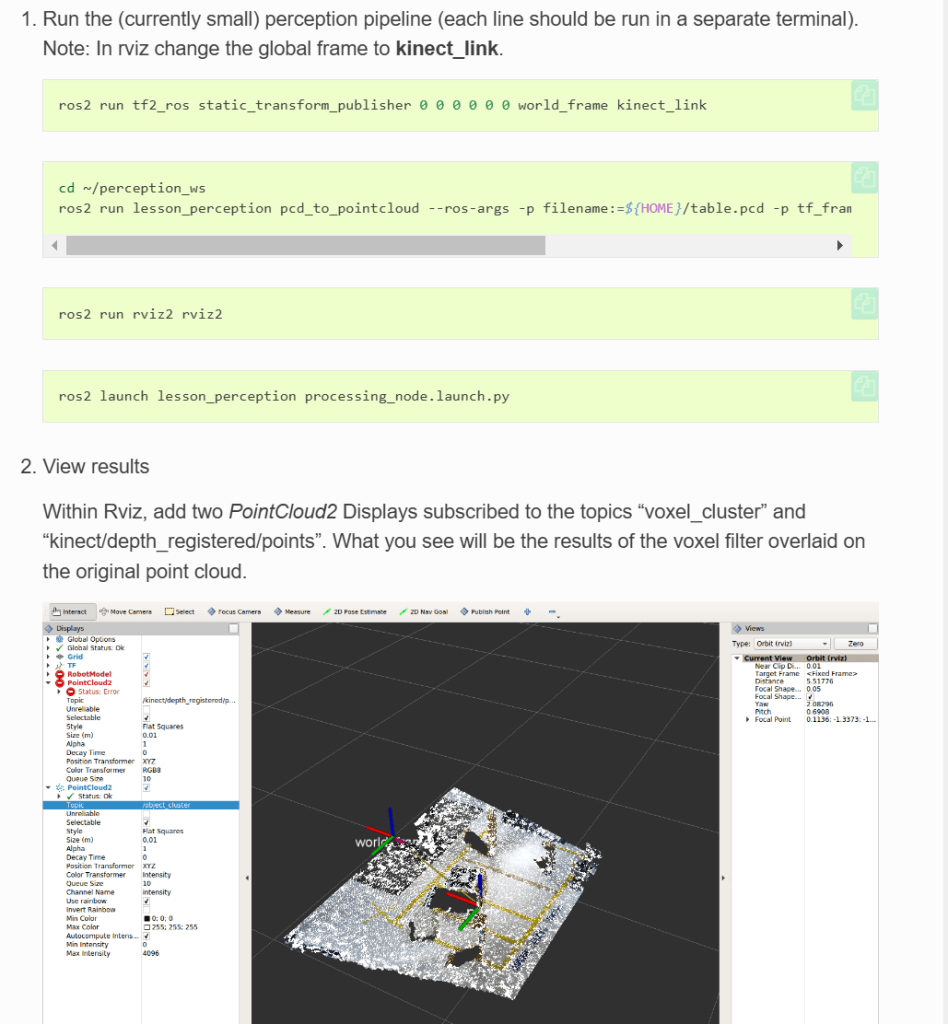
Then do the build and source and view the result
then apply passthrough filters on x, y and z, and view the result.
Next, apply plan segmentation, this method is one of the most useful application for an object on a flat surface. perform a plane fit to the points, which finds the points which comprise the table, and then subtract those points so that you are left with only points corresponding to the object(s) above the table. This is the most complicated PCL method, a combination of two: the RANSAC segmentation model, and the extract indices tool. An in depth example can be found on the PCL Plane Model Segmentation Tutorial.

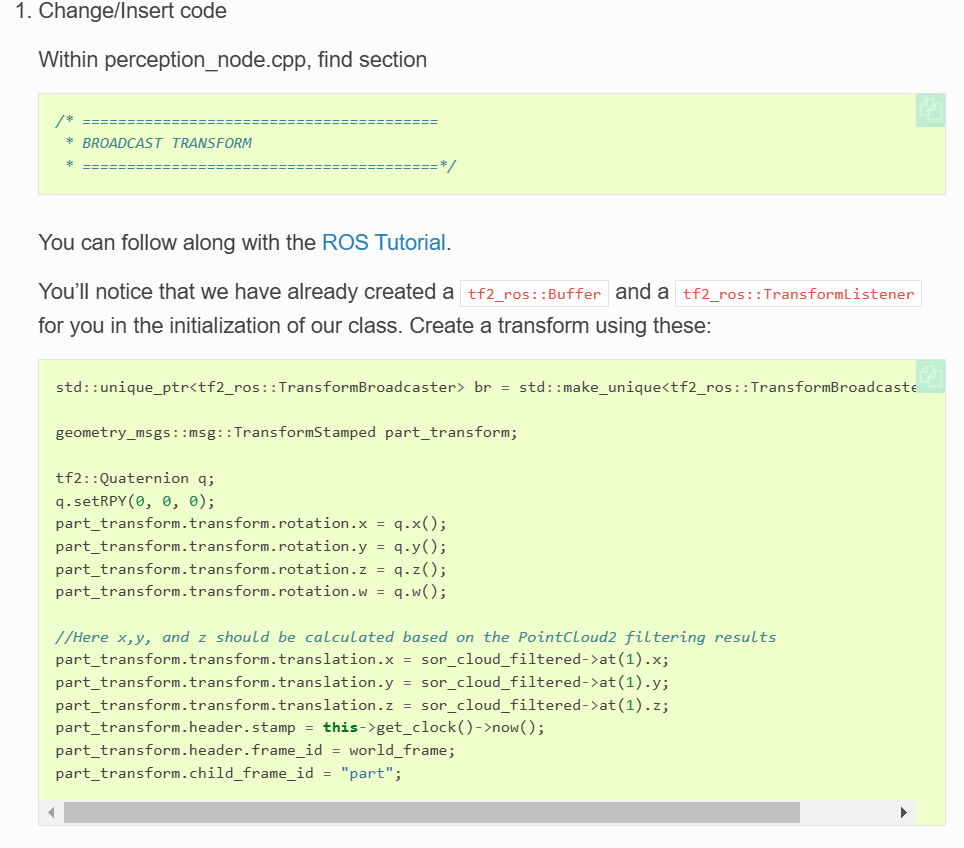
Lastly to create a broadcast transform: which mean the processing pipeline (processing camera, Lidar data etc.) measurement, location, or some other message for other nodes to do tf.